GAMES101-L04 变换(模型、视图、投影)
视图变换
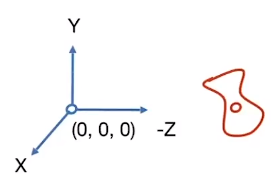
相机
相机的位置\(\overrightarrow{e}\)
相机的视线\(\widehat{g}\)
相机向上方向\(\widehat{t}\)
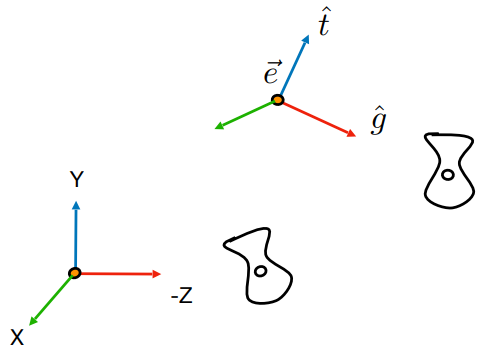
视图变换
将所有物品和相机进行移动,使得相机移动到标准位:相机处于原点,向-Z方向看,向上方向为Y
先将 \(\overrightarrow{e}\) 平移到原点,再将 \(\widehat{g}\) 旋转到 -Z 方向,再将 \(\widehat{t}\) 旋转到 Y 方向,最后将 \((g \times t)\) 旋转到 X 方向。
\(M_{\text {view }}=R_{\text {view }} T_{\text {view }}\)
1.平移 \(\overrightarrow{e}\) 到原点
\(T_{\text {view }}= \begin{bmatrix} 1 & 0 & 0 & -x_e \\ 0 & 1 & 0 & -y_e \\ 0 & 0 & 1 & -z_e \\ 0 & 0 & 0 & 1 \end{bmatrix}\)
2. 旋转 \(\widehat{g}\) 到 -Z 方向,旋转 \(\widehat{t}\) 到 Y 方向,旋转 \((g \times t)\) 到 X 方向。
\(R_{\text {view }}=\begin{bmatrix}x_{\hat{g} \times \hat{t}} & y_{\hat{g} \times \hat{t}} & z_{\hat{g} \times \hat{t}} & 0 \\x_t & y_t & z_t & 0 \\x_{-g} & y_{-g} & z_{-g} & 0 \\0 & 0 & 0 & 1\end{bmatrix}\)
投影
投影分为正交投影和透视投影
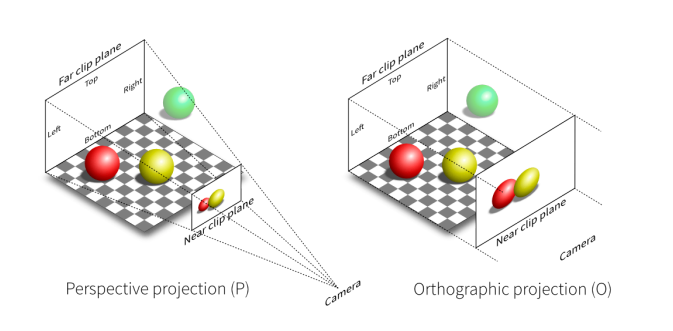
视景体
视景体是指由摄像机或观察者所看到的场景的几何形状,它是由6个平面确定的区域,这6个平面分别为上平面(up)、下平面(down)、左平面(left)、右平面(right)、远平面(far)和近平面(near)。视景体内的物体可以被投影到近平面上,而视景体外面的物体则会被裁剪掉。
l(left):视景体左侧相对于相机的距离。
r(right):视景体右侧相对于相机的距离。
n(near):视景体近端相对于相机的距离。
f(far):视景体远端相对于相机的距离。
t(top):视景体上侧相对于相机的距离。
b(bottom):视景体下侧相对于相机的距离。
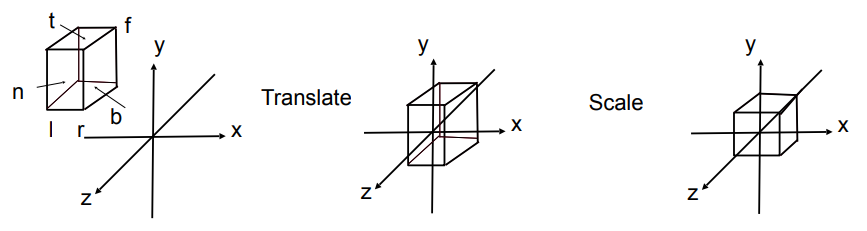
正交投影
1.定义一个立方体,即视景体\([l,r]\times[b,t]\times[f,n]\)
2.将视景体的中心移动到原点
3.将视景体的边长拉升成\([-1,1]^3\)
4.得到一个Canonical(正则、规范、标准)立方体
判断远近:使用原立方体的z坐标 \([f,n]\),由于是看向-Z方向,所以当Z坐标值越大,离相机越近,Z坐标值越小,离相机越远
数学表达:
先将中心平移到原点上,然后进行缩放
\(M_{\text {ortho }}=\begin{bmatrix}\frac{2}{r-l} & 0 & 0 & 0 \\0 & \frac{2}{t-b} & 0 & 0 \\0 & 0 & \frac{2}{n-f} & 0 \\0 & 0 & 0 & 1\end{bmatrix}\begin{bmatrix}1 & 0 & 0 & -\frac{r+l}{2} \\0 & 1 & 0 & -\frac{t+b}{2} \\0 & 0 & 1 & -\frac{n+f}{2} \\0 & 0 & 0 & 1\end{bmatrix}\)
但由于有之前的视图变换,视景体n、f平面的中心就在Z轴上,所以平移时只需要将视景体沿Z轴平移使中心在坐标原点上。
并且有\(r=-l\),\(b=-t\)。
所以公式可以进行简化
\(M_{\text {ortho }}=\begin{bmatrix}\frac{2}{r-l} & 0 & 0 & 0 \\0 & \frac{2}{t-b} & 0 & 0 \\0 & 0 & \frac{2}{n-f} & 0 \\0 & 0 & 0 & 1\end{bmatrix}\begin{bmatrix}1 & 0 & 0 & 0 \\0 & 1 & 0 & 0 \\0 & 0 & 1 & -\frac{n+f}{2} \\0 & 0 & 0 & 1\end{bmatrix}\)
透视投影
根据齐次坐标的定义 \(\begin{bmatrix}<br/>x / w \\<br/>y / w \\<br/>z / w \\<br/>1<br/>\end{bmatrix}, w \neq 0\)\(可知,将里面每个元素乘以\)k(k)$后,表示的是同一向量。
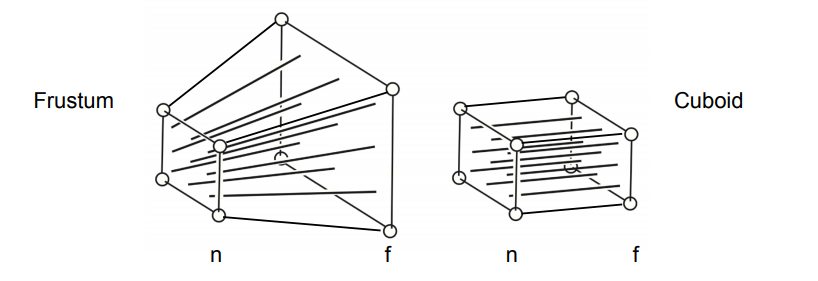
在进行透视投影时,先将透视投影的棱台进行挤压,直到变成视景体,即一个长方体,然后再进行正交投影
在挤压时,要遵循:
1.近平面挤压后不变
2.远平面挤压后Z值不变
3.远平面的中心挤压后仍然为中心
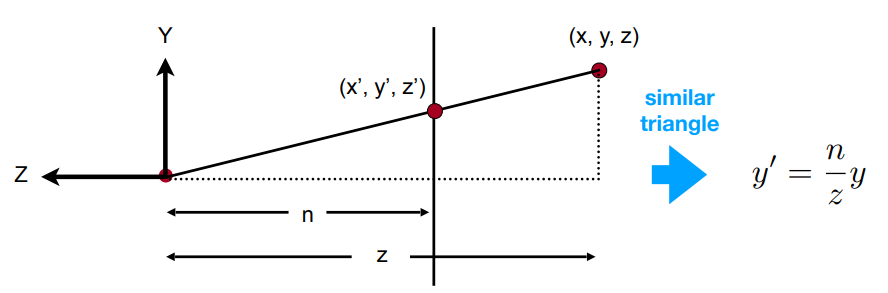
对于点\((x,y,z)\)被挤压后得到\((x^{\prime},y^{\prime}, z^{\prime})\) ,根据相似三角形可得:
\(x^{\prime}=\frac{n}{z} x\)
\(y^{\prime}=\frac{n}{z} y\)
写作齐次坐标为:
\(\begin{bmatrix}x \\y \\z \\1\end{bmatrix}\Rightarrow\begin{bmatrix}n x / z \\n y / z \\\text { unknown } \\1\end{bmatrix}\stackrel{\text { mult. by z }}{==}\begin{bmatrix}n x \\n y \\\text { still unknown } \\z\end{bmatrix}\)
于是可以得出\(M_{\text {persp } \rightarrow \text { ortho }}\)为:
\(M_{\text {persp } \rightarrow \text { ortho }}=\begin{bmatrix}n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ ? & ? & ? & ? \\ 0 & 0 & 1 & 0 \end{bmatrix}\)
现在需要求出Z坐标,也就是上述矩阵的第三行。
根据以上压缩时遵循的三个原则的第一点,近平面挤压后不变,可以写出以下方程
\(\begin{bmatrix}x \\y \\n \\1\end{bmatrix}\Rightarrow\begin{bmatrix}x \\y \\n \\1\end{bmatrix}==\begin{bmatrix}n x \\n y \\n^2 \\n\end{bmatrix}\)
因此,第三行的形式为\(\begin{bmatrix}0 &0 &A &B\end{bmatrix}\)
\(\begin{bmatrix}0 &0 &A &B\end{bmatrix}\begin{bmatrix}0\\ 0\\ A\\ B\end{bmatrix}\=n^2\)
即\(A n+B=n^2\)
根据以上原则的第二点,远平面挤压后Z值不变,可以写出以下方程
\(\begin{bmatrix}0 \\0 \\f \\1\end{bmatrix}\Rightarrow\begin{bmatrix}0 \\0 \\f \\1\end{bmatrix}==\begin{bmatrix}0 \\0 \\f^2 \\f\end{bmatrix}\)
即\(A f+B=f^2\)
联立2个方程,可以解出A、B
\(\begin{aligned}& A=n+f \\& B=-n f\end{aligned}\)
综上,可以得出\(M_{\text {persp } \rightarrow \text { ortho }}\)为:
\(M_{\text {persp } \rightarrow \text { ortho }}=\begin{bmatrix}n & 0 & 0 & 0 \\0 & n & 0 & 0 \\0 & 0 & n+f & -nf \\0 & 0 & 1 & 0\end{bmatrix}\)